
Мануал по использованию системы МУР
Система МУР — обеспечивает защиту от GPS-спуфинга и глушения, а также автономный возврат по инерциальной системе и компасу в условиях полной потери связи и навигации.
МУР повышает надёжность выполнения миссий в сложной радиоэлектронной обстановке. Позволяет дрону безопасно преодолевать РЭБ в отсутствии GPS-сигнала и управления.
МУР повышает надёжность выполнения миссий в сложной радиоэлектронной обстановке. Позволяет дрону безопасно преодолевать РЭБ в отсутствии GPS-сигнала и управления.
Подробная видео инструкция
(МУРС + Cброс)
Проект обеспечивает функционал для БПЛА - уход от РЭБ и сброс боевой нагрузки. , Взаимодействует с БПЛА на Ardupilot и приемником сигналов управления, работающего на базе протокола SBUS. При потере связи контроллер перехватывает поток SBUS от приемника и начинает формировать свой. При возврате связи с наземной станции управление автоматически передается оператору.
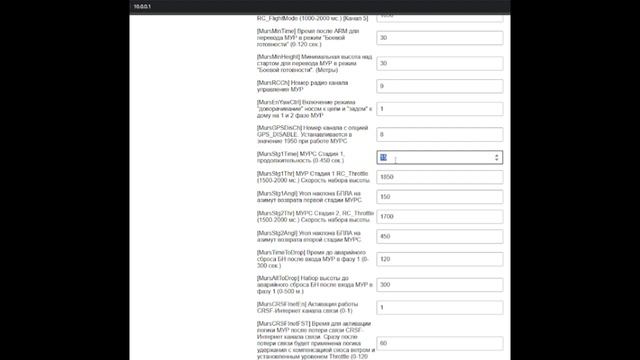
Web конфигуратор
Клиенту WiFi доступен web-интерфейс конфигурирования системы. Для доступа откройте сайт по адресу http://10.0.0.1.
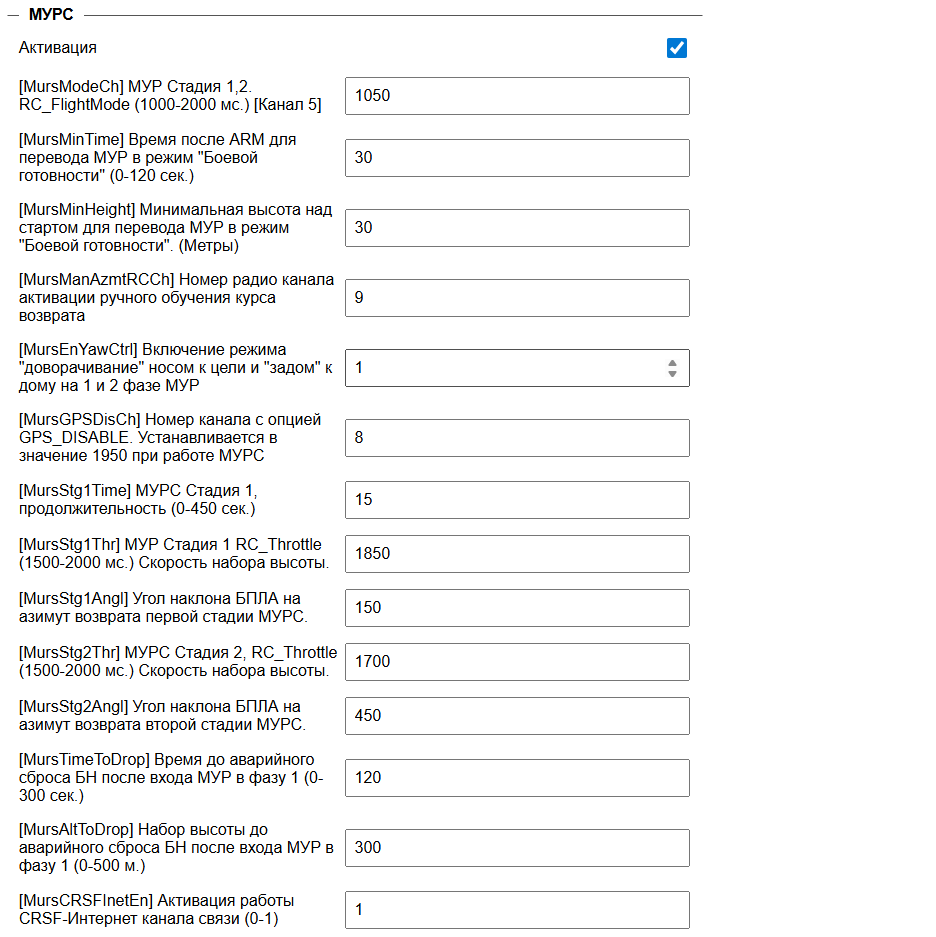
Доступные параметры
MursEnabled - включение системы МУР
MursModeCh - МУР Стадия 1. RC_FlightMode (1000-2000 мс.) [Канал 5]
Значение канала 5 (FltMode) во время работы МУР. Установить в диапазон работы режима ATL_HOLD
MursMinTime Время после ARM для перевода МУР в рабочее положение (0-120 сек.)
Время через которое МУР перейдет в режим "боевой готовности". Установка параметр в '0' отключит проверку и система МУР перейдет в режим "боевой готовности" сразу после запуска моторов.
Перевод системы в боевой режим происходит по одному из двух условий, определяемых независимо друг от друга. К примеру: активация по высоте не требует прохождения условия по времени и наоборот.
MursMinHeight Минимальная высота над стартом для перевода МУР в рабочее положение. (Метры)
Установка минимальной высоты над стартом для перевода МУР в режим "боевой готовности". Установка параметр в '0' отключит проверку и система МУР перейдет в режим "боевой готовности" сразу после запуска моторов.
MursManAzmtRCCh Номер радио канала активации ручного обучения курса возврата
MursEnYawCtrl Включение режима "доворачивания" БПЛА носом цели, задом к дому
MursGPSDisCh Номер канала GPS_DISABLE. Система установит значение канала в 1950 при потери связи
MursStg1Time МУРС Стадия 1, продолжительность (0-120 сек.)
Продолжительность первой стадии набора высоты.
MursStg1Thr МУР Стадия 1 RC_Throttle (1500-2000 мс.)
Значение канала Throttle первой стадии МУРС. (Скорость набора высоты)
MursStg1Angl МУР Стадия 1. Максимальное отклонение БЛПА в сторону обученного дома.
MursStg2Angl МУР Стадия 2. Максимальное отклонение БЛПА в сторону обученного дома
MursStg2Thr МУРС Стадия 2, RC_Throttle (1500-2000 мс.)
Значение канала Throttle второй стадии МУРС. (Скорость набора высоты)
MursTimeToDrop Время до аварийного сброса БН после потери связи (0-60 сек.)
Установка времени с начала работы МУРС через которое произойдет аварийный сброс боевой нагрузки. Установка параметра в '0' отключит данную проверку, по ней не будет производиться аварийный сброс боевой нагрузки.
MursAltToDrop Набор высоты до аварийного сброса БН после потери связи (0-500 м.)
Установка высоты с начала работы МУРС после набора которого система произведет аварийный сброс нагрузки. Установка параметра в '0' отключит данную проверку, по ней не будет производиться аварийный сброс боевой нагрузки.
> Аварийный сброс боевой нагрузки произойдет при активации любого из условий.
MursCRSFInetEn Активация работы CRSF-Интернет канала связи
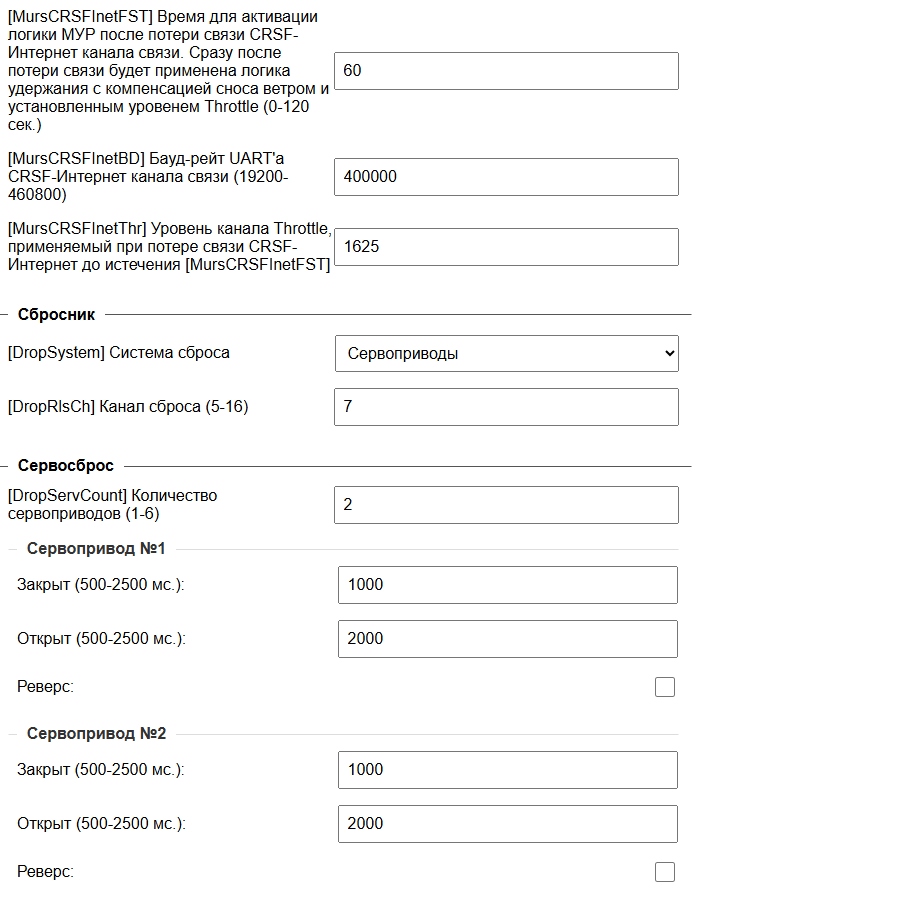
MursCRSFInetFST Время для активации логики МУР после потери связи CRSF-Интернет канала связи. Сразу после потери связи будет применена логика удержания с компенсацией сноса ветром и установленным уровенем Throttle (0-120 сек.)
MursCRSFInetBD Бауд-рейт UART'а CRSF-Интернет канала связи (19200-42000)
MursCRSFInetThr Уровень канала Throttle, применяемый при потере связи CRSF-Интернет до истечения "MursCRSFInetFST"
DropSystem Система сброса
Тип используемой системы сброса
DropRlsCh Канал сброса (5-16) Радио канал активации сброса.
DropPyroCount
WiFi Мост MAVLink к ПК
Подключенный клиент WiFi может использовать МУР для доступа к MAVLink полетного контроллера через UDP. Адрес сервера MAVLink udp://10.0.0.1:14550.
Система имеет два основных режима:
Режим «Не готов»: начальный режим при запуске системы
Режим «Боевая готовность»
Режим "боевая готовность" активируется автоматически после одного из условий:
истечения заданного временного интервала с первого запуска моторов БПЛА
достижения установленной высоты с точки старта
Параметры времени и высоты настраиваются через веб-конфигуратор. После активации режима «Боевая готовность» он сохраняется между полетами и не сбрасывается автоматически.
Обучение курсу возврата домой
Для активации ручного обучения курса оператору необходимо перевести значение заданного радиоканала выше 1500. После этого система передаст на наземную станцию сообщение "МУР Запоминаю курс на цель" и начнет анализировать положение стиков и курс полета БПЛА для определения курса возврата и степени компенсации сноса ветра. При накоплении степени доверия данных система запомнит курс и степень сноса ветру и будет использовать их при срабатывании ухода от РЭБ.
Примерный вывод информации о процессе обучения в консоли наземной станции оператора.
> МУР Запоминаю курс на цель
> МУР Курс готов: 0%
> МУР Курс готов: 11%
> МУР Курс готов: 22%
> МУР Курс готов: 33%
> МУР Курс готов: 44%
> МУР Курс готов: 55%
> МУР Курс готов: 66%
> МУР Курс готов: 77%
> МУР Курс готов: 88%
> МУР Курс готов: 99%
> МУР Курс задан: 310 гр.
Важно:
Необходимо использовать режим AltHold для задания курса без автоматической компенсации ветра по данным GPS
Для определения влияния ветра cистема анализирует положение стика Roll. Для повышения точности компенсации ветру во время обучения необходимо направить БПЛА точно на цель, начать движение вперед (стик Pitch) и компенсировать снос ветра стиком Roll, сохраняя воздушный и наземный путь на одной оси.
Система завершит обучение курса после накопления уровня доверия к данным. При соблюдении условий, обучение курса возврата занимает порядка 10 секунд. При изменении положении стиков степень доверия уменьшится, что потребует больше времени на обучение.
В дополнении к ручному обучению система автоматически анализирует курс БПЛА, движение и положение стиков для определения курса домой с начала движения БПЛА до накопления степени доверия данным. Данный метод необходим на случай отсутствия курса возврата по методу "ручного обучения".
Алгоритм действия пилота
Рассчитать направление на область боевой задачи, в которой предположительно произойдет потеря связи
Взлететь, ориентировать БПЛА в сторону боевой задачи
Включить режим AltHold, включить ручное обучение курсу возврата и начать движение БПЛА в сторону боевой задачи, используя правый стик Pitch. (Отклонив правый стик от себя). Для повышения точности возврата, необходимо сохранять прямое движение относительно земли, компенсируя смещение ветра с помощью правого стика Roll. (Отклонив правый стик влево или вправо)
Система начнет передавать на наземную станцию сообщение вида "МУР Курс готов: XX%". Необходимо поддерживать направление движения до тех пор, пока не придет сообщение "МУР Курс задан: YYY гр.". Системой запоминается курс, обратный текущему движению. При сохранении курса движения и отсутствия больших изменений положения стиков процесс занимает порядка 10 секунд
После этого, по необходимости, можно избрать иной маршрут подхода к области боевой задачи
При потере связи активируется двух-ступенчатый алгоритм ухода от РЭБ. На первой фазе БПЛА начнет набирать высоту в течении заданного времени. На второй фазе система направит БПЛА по обученному курсу и начнет движение
При восстановлении связи система отправит сообщение на базовую станцию "МУР связь восстановлена" и сразу передаст управление оператору
При повторной потере связи система воспроизведет аналогичный двух-ступенчатый алгоритм ухода от РЭБ
Система сброса
Система Сервосброса
Система сервосброса позволяет управлять от 1 до 6 сервоприводами для освобождения полезной нагрузки. Логика работы — система просматривает значение заданного канала сброса нагрузки. Если значение превысило 1600 запускается сброс полезной нагрузки — открывается сервопривод. Через 2.5 секунды сервопривод будет закрыт. После того как значение канала стало меньше 1400 система снова ожидает превышение этого канала для запаска работы следующего сервопривода.
Индикатор состояния "МУР"
Проект обеспечивает функционал для БПЛА - уход от РЭБ и сброс боевой нагрузки. , Взаимодействует с БПЛА на Ardupilot и приемником сигналов управления, работающего на базе протокола SBUS. При потере связи контроллер перехватывает поток SBUS от приемника и начинает формировать свой. При возврате связи с наземной станции управление автоматически передается оператору.
Web конфигуратор
Клиенту WiFi доступен web-интерфейс конфигурирования системы. Для доступа откройте сайт по адресу http://10.0.0.1.
Доступные параметры
MursEnabled - включение системы МУР
MursModeCh - МУР Стадия 1. RC_FlightMode (1000-2000 мс.) [Канал 5]
Значение канала 5 (FltMode) во время работы МУР. Установить в диапазон работы режима ATL_HOLD
MursMinTime Время после ARM для перевода МУР в рабочее положение (0-120 сек.)
Время через которое МУР перейдет в режим "боевой готовности". Установка параметр в '0' отключит проверку и система МУР перейдет в режим "боевой готовности" сразу после запуска моторов.
Перевод системы в боевой режим происходит по одному из двух условий, определяемых независимо друг от друга. К примеру: активация по высоте не требует прохождения условия по времени и наоборот.
MursMinHeight Минимальная высота над стартом для перевода МУР в рабочее положение. (Метры)
Установка минимальной высоты над стартом для перевода МУР в режим "боевой готовности". Установка параметр в '0' отключит проверку и система МУР перейдет в режим "боевой готовности" сразу после запуска моторов.
MursManAzmtRCCh Номер радио канала активации ручного обучения курса возврата
MursEnYawCtrl Включение режима "доворачивания" БПЛА носом цели, задом к дому
MursGPSDisCh Номер канала GPS_DISABLE. Система установит значение канала в 1950 при потери связи
MursStg1Time МУРС Стадия 1, продолжительность (0-120 сек.)
Продолжительность первой стадии набора высоты.
MursStg1Thr МУР Стадия 1 RC_Throttle (1500-2000 мс.)
Значение канала Throttle первой стадии МУРС. (Скорость набора высоты)
MursStg1Angl МУР Стадия 1. Максимальное отклонение БЛПА в сторону обученного дома.
MursStg2Angl МУР Стадия 2. Максимальное отклонение БЛПА в сторону обученного дома
MursStg2Thr МУРС Стадия 2, RC_Throttle (1500-2000 мс.)
Значение канала Throttle второй стадии МУРС. (Скорость набора высоты)
MursTimeToDrop Время до аварийного сброса БН после потери связи (0-60 сек.)
Установка времени с начала работы МУРС через которое произойдет аварийный сброс боевой нагрузки. Установка параметра в '0' отключит данную проверку, по ней не будет производиться аварийный сброс боевой нагрузки.
MursAltToDrop Набор высоты до аварийного сброса БН после потери связи (0-500 м.)
Установка высоты с начала работы МУРС после набора которого система произведет аварийный сброс нагрузки. Установка параметра в '0' отключит данную проверку, по ней не будет производиться аварийный сброс боевой нагрузки.
> Аварийный сброс боевой нагрузки произойдет при активации любого из условий.
MursCRSFInetEn Активация работы CRSF-Интернет канала связи
MursCRSFInetFST Время для активации логики МУР после потери связи CRSF-Интернет канала связи. Сразу после потери связи будет применена логика удержания с компенсацией сноса ветром и установленным уровенем Throttle (0-120 сек.)
MursCRSFInetBD Бауд-рейт UART'а CRSF-Интернет канала связи (19200-42000)
MursCRSFInetThr Уровень канала Throttle, применяемый при потере связи CRSF-Интернет до истечения "MursCRSFInetFST"
DropSystem Система сброса
Тип используемой системы сброса
DropRlsCh Канал сброса (5-16) Радио канал активации сброса.
DropPyroCount
WiFi Мост MAVLink к ПК
Подключенный клиент WiFi может использовать МУР для доступа к MAVLink полетного контроллера через UDP. Адрес сервера MAVLink udp://10.0.0.1:14550.
Алгоритм работы
При потере связи с наземной станцией система активирует двухэтапный алгоритм ухода:
Стадия 1: набор высоты в течение заданного временного интервала
Стадия 2: автоматический разворот носом на цель и движение БПЛА на обученный курс возврата
Система позволяет производить аварийный сброс боевой нагрзуки после срабатывания логики ухода от РЭБ. Аварийный сброс может происходит после прошествия времени или набранной высоты с начала работы МУР.
При потере связи с наземной станцией система активирует двухэтапный алгоритм ухода:
Стадия 1: набор высоты в течение заданного временного интервала
Стадия 2: автоматический разворот носом на цель и движение БПЛА на обученный курс возврата
Система позволяет производить аварийный сброс боевой нагрзуки после срабатывания логики ухода от РЭБ. Аварийный сброс может происходит после прошествия времени или набранной высоты с начала работы МУР.
Данные параметры устанвливаются через web-конфигуратор. Установка параметра в значение '0' отключит данное условие аварийного сброса нагрузки.
Режимы работы системы
Режимы работы системы
Система имеет два основных режима:
Режим «Не готов»: начальный режим при запуске системы
Режим «Боевая готовность»
Режим "боевая готовность" активируется автоматически после одного из условий:
истечения заданного временного интервала с первого запуска моторов БПЛА
достижения установленной высоты с точки старта
Параметры времени и высоты настраиваются через веб-конфигуратор. После активации режима «Боевая готовность» он сохраняется между полетами и не сбрасывается автоматически.
Обучение курсу возврата домой
Для активации ручного обучения курса оператору необходимо перевести значение заданного радиоканала выше 1500. После этого система передаст на наземную станцию сообщение "МУР Запоминаю курс на цель" и начнет анализировать положение стиков и курс полета БПЛА для определения курса возврата и степени компенсации сноса ветра. При накоплении степени доверия данных система запомнит курс и степень сноса ветру и будет использовать их при срабатывании ухода от РЭБ.
Примерный вывод информации о процессе обучения в консоли наземной станции оператора.
> МУР Запоминаю курс на цель
> МУР Курс готов: 0%
> МУР Курс готов: 11%
> МУР Курс готов: 22%
> МУР Курс готов: 33%
> МУР Курс готов: 44%
> МУР Курс готов: 55%
> МУР Курс готов: 66%
> МУР Курс готов: 77%
> МУР Курс готов: 88%
> МУР Курс готов: 99%
> МУР Курс задан: 310 гр.
Важно:
Необходимо использовать режим AltHold для задания курса без автоматической компенсации ветра по данным GPS
Для определения влияния ветра cистема анализирует положение стика Roll. Для повышения точности компенсации ветру во время обучения необходимо направить БПЛА точно на цель, начать движение вперед (стик Pitch) и компенсировать снос ветра стиком Roll, сохраняя воздушный и наземный путь на одной оси.
Система завершит обучение курса после накопления уровня доверия к данным. При соблюдении условий, обучение курса возврата занимает порядка 10 секунд. При изменении положении стиков степень доверия уменьшится, что потребует больше времени на обучение.
В дополнении к ручному обучению система автоматически анализирует курс БПЛА, движение и положение стиков для определения курса домой с начала движения БПЛА до накопления степени доверия данным. Данный метод необходим на случай отсутствия курса возврата по методу "ручного обучения".
Алгоритм действия пилота
Рассчитать направление на область боевой задачи, в которой предположительно произойдет потеря связи
Взлететь, ориентировать БПЛА в сторону боевой задачи
Включить режим AltHold, включить ручное обучение курсу возврата и начать движение БПЛА в сторону боевой задачи, используя правый стик Pitch. (Отклонив правый стик от себя). Для повышения точности возврата, необходимо сохранять прямое движение относительно земли, компенсируя смещение ветра с помощью правого стика Roll. (Отклонив правый стик влево или вправо)
Система начнет передавать на наземную станцию сообщение вида "МУР Курс готов: XX%". Необходимо поддерживать направление движения до тех пор, пока не придет сообщение "МУР Курс задан: YYY гр.". Системой запоминается курс, обратный текущему движению. При сохранении курса движения и отсутствия больших изменений положения стиков процесс занимает порядка 10 секунд
После этого, по необходимости, можно избрать иной маршрут подхода к области боевой задачи
При потере связи активируется двух-ступенчатый алгоритм ухода от РЭБ. На первой фазе БПЛА начнет набирать высоту в течении заданного времени. На второй фазе система направит БПЛА по обученному курсу и начнет движение
При восстановлении связи система отправит сообщение на базовую станцию "МУР связь восстановлена" и сразу передаст управление оператору
При повторной потере связи система воспроизведет аналогичный двух-ступенчатый алгоритм ухода от РЭБ
Система сброса
Система Сервосброса
Система сервосброса позволяет управлять от 1 до 6 сервоприводами для освобождения полезной нагрузки. Логика работы — система просматривает значение заданного канала сброса нагрузки. Если значение превысило 1600 запускается сброс полезной нагрузки — открывается сервопривод. Через 2.5 секунды сервопривод будет закрыт. После того как значение канала стало меньше 1400 система снова ожидает превышение этого канала для запаска работы следующего сервопривода.
Индикатор состояния "МУР"
> 1_2_3 Пауза
Где:
"1-3" — короткий или длинный сигнал кодирующий определенное состояние системы
"_" — пауза в 0.2 с.
Короткий сигнал 0.2 сек.
Длинный сигнал 0.8 сек.
Пауза 2 секунды.
1 Наличие входящего MAVLink (Короткий - отсутствует, Длинный - присутствует)
2 Наличие входящего SBUS (Короткий - отсутствует, Длинный - присутствует)
3 Наличие входящего CRSF-Интернет соединения (Короткий - отсутствует, Длинный - присутствует)
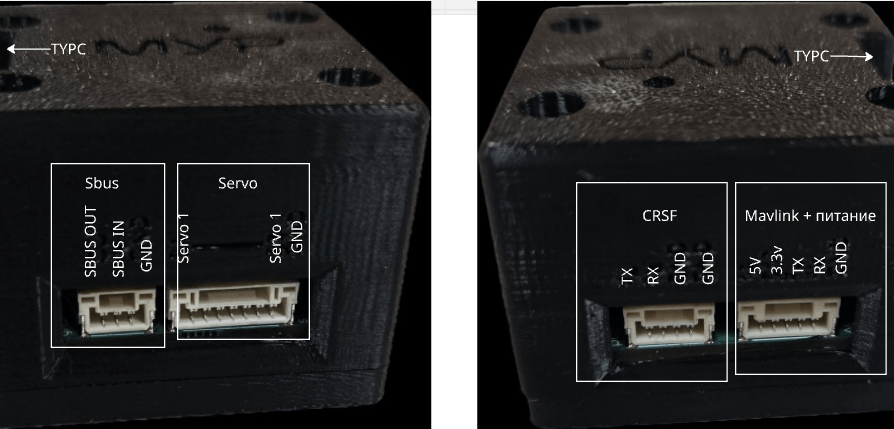
Подключение
Обозначения
FC — Flight Computer. Полётный компьютер
RCRx — Receiver RX. SBUS приемник
MAVLink — Протокол передачи телеметрии
UART — Universal Asynchronous Reseiver Transmitter. Универсальный асинхронный приемно-передатчик
Подключить +5v платы ESP с +5v полетного контроллера
МУР MAVLink
Скорость UART MAVLink 115200 baud.
МУР Полетный контроллер
+--------------------+ +-------------------+
| MAVLinx Rx GPIO 12 |<-----| MAVLink Tx |
| MAVLink Tx GPIO 13 |----->| MAVLink Rx |
+--------------------+ +-------------------+
МУР GPIO 12 (MAVLinx Rx) < FC MAVLink Tx
МУР GPIO 13 (MAVLinx Tx) > FC MAVLink Rx
МУР SBUS
Приемник SBUS МУР Полетный контроллер
+-------------+ +----------------------------------+ +------------------+
| SBUS Tx |--->| SBUS Rx GPIO 10 | | |
+-------------+ | SBUS Tx GPIO 11 |--->| SBUS Rx |
+----------------------------------+ +------------------+
МУР GPIO 10 (SBUS Rx) < RCRx (SBUS Tx)
МУР GPIO 11 (SBUS Tx) > FC (SBUS Rx PIN)
МУР - CRSF Интернет
Источник CRSF МУР
+-------------------+ +--------------------+
| CRSF Tx |----->| CRSF Rx GPIO 9 |
| CRSF Rx |<-----| CRSF Tx GPIO 8 |
+-------------------+ +--------------------+
МУР Сброс Серво
Возможно подключить до 6 сервоприводов
МУР GPIO 1 > Сервоприво 1 (Управляющий пин)
МУР GPIO 2 > Сервоприво 2 (Управляющий пин)
МУР GPIO 4 > Сервоприво 3 (Управляющий пин)
МУР GPIO 5 > Сервоприво 4 (Управляющий пин)
МУР GPIO 6 > Сервоприво 5 (Управляющий пин)
МУР GPIO 7 > Сервоприво 6 (Управляющий пин)
Настройки каналов по-умолчанию:
Flt mode 5
Сброс 7
Gps disable 8
Обучение 9
Ручное обучение.
Производится во время RC_CH MursManAzmtRCCh > 1500 до накопления требуемого уровня доверия. При повторной активации процесс произоводится с "нуля". Если при повторном обучении система уже имеет обученные данные с необходимым уровнем доверия, она запоминает их и будет использует в случае отсутствия новых данных для компенсации сноса ветром. Ручное обучение доступно только если БПЛА находится в режиме ALT_HOLD, — если FLT_MODE (канал 5) находится в пределах +-150 от параметра MursModeCh.
В проекте используется стандартная "раскладка" канала RC_PITCH в стиле Ardupilot. Значение RC_PITCH <1500 должны приводить движение БПЛА "вперед", а значения >1500 - "назад". Использование раскладки "как в betaflight" приведет к невозможности расчета азимута возврата. Параметр RC2_REVERSED должен быть в значении 0.
Где:
"1-3" — короткий или длинный сигнал кодирующий определенное состояние системы
"_" — пауза в 0.2 с.
Короткий сигнал 0.2 сек.
Длинный сигнал 0.8 сек.
Пауза 2 секунды.
1 Наличие входящего MAVLink (Короткий - отсутствует, Длинный - присутствует)
2 Наличие входящего SBUS (Короткий - отсутствует, Длинный - присутствует)
3 Наличие входящего CRSF-Интернет соединения (Короткий - отсутствует, Длинный - присутствует)
Подключение
Обозначения
FC — Flight Computer. Полётный компьютер
RCRx — Receiver RX. SBUS приемник
MAVLink — Протокол передачи телеметрии
UART — Universal Asynchronous Reseiver Transmitter. Универсальный асинхронный приемно-передатчик
Подключить +5v платы ESP с +5v полетного контроллера
МУР MAVLink
Скорость UART MAVLink 115200 baud.
МУР Полетный контроллер
+--------------------+ +-------------------+
| MAVLinx Rx GPIO 12 |<-----| MAVLink Tx |
| MAVLink Tx GPIO 13 |----->| MAVLink Rx |
+--------------------+ +-------------------+
МУР GPIO 12 (MAVLinx Rx) < FC MAVLink Tx
МУР GPIO 13 (MAVLinx Tx) > FC MAVLink Rx
МУР SBUS
Приемник SBUS МУР Полетный контроллер
+-------------+ +----------------------------------+ +------------------+
| SBUS Tx |--->| SBUS Rx GPIO 10 | | |
+-------------+ | SBUS Tx GPIO 11 |--->| SBUS Rx |
+----------------------------------+ +------------------+
МУР GPIO 10 (SBUS Rx) < RCRx (SBUS Tx)
МУР GPIO 11 (SBUS Tx) > FC (SBUS Rx PIN)
МУР - CRSF Интернет
Источник CRSF МУР
+-------------------+ +--------------------+
| CRSF Tx |----->| CRSF Rx GPIO 9 |
| CRSF Rx |<-----| CRSF Tx GPIO 8 |
+-------------------+ +--------------------+
МУР Сброс Серво
Возможно подключить до 6 сервоприводов
МУР GPIO 1 > Сервоприво 1 (Управляющий пин)
МУР GPIO 2 > Сервоприво 2 (Управляющий пин)
МУР GPIO 4 > Сервоприво 3 (Управляющий пин)
МУР GPIO 5 > Сервоприво 4 (Управляющий пин)
МУР GPIO 6 > Сервоприво 5 (Управляющий пин)
МУР GPIO 7 > Сервоприво 6 (Управляющий пин)
Настройки каналов по-умолчанию:
Flt mode 5
Сброс 7
Gps disable 8
Обучение 9
Ручное обучение.
Производится во время RC_CH MursManAzmtRCCh > 1500 до накопления требуемого уровня доверия. При повторной активации процесс произоводится с "нуля". Если при повторном обучении система уже имеет обученные данные с необходимым уровнем доверия, она запоминает их и будет использует в случае отсутствия новых данных для компенсации сноса ветром. Ручное обучение доступно только если БПЛА находится в режиме ALT_HOLD, — если FLT_MODE (канал 5) находится в пределах +-150 от параметра MursModeCh.
В проекте используется стандартная "раскладка" канала RC_PITCH в стиле Ardupilot. Значение RC_PITCH <1500 должны приводить движение БПЛА "вперед", а значения >1500 - "назад". Использование раскладки "как в betaflight" приведет к невозможности расчета азимута возврата. Параметр RC2_REVERSED должен быть в значении 0.

Все права защищены 2026 ©
8 (912) 687-83-63
09:00 - 19:00 кроме выходных
Адрес
г. Екатеринбург, ул. Дублер сибирского тракта 2 офис 31 ТЦ «Комсомолл», офис 31
09:00 - 19:00 кроме выходных
Адрес
г. Екатеринбург, ул. Дублер сибирского тракта 2 офис 31 ТЦ «Комсомолл», офис 31